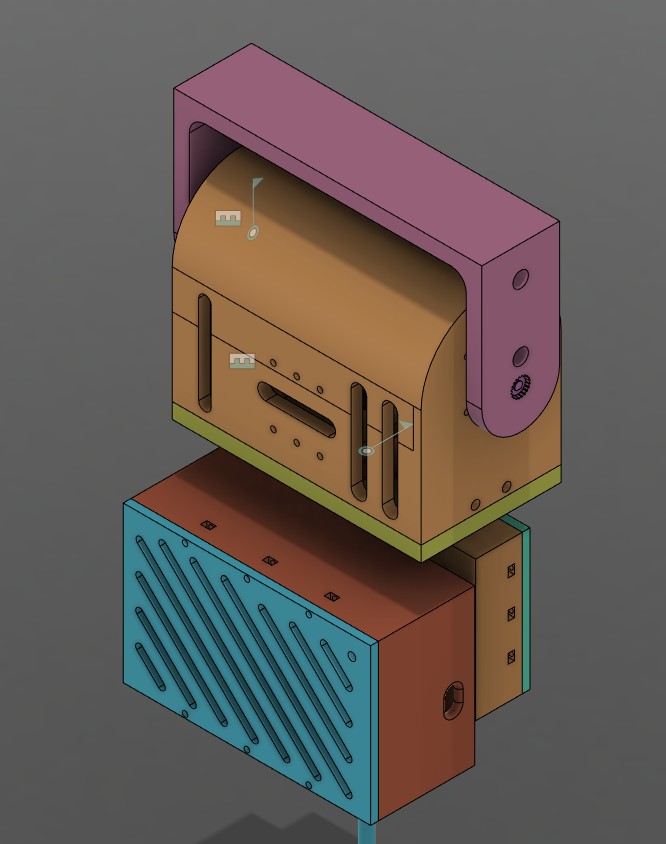
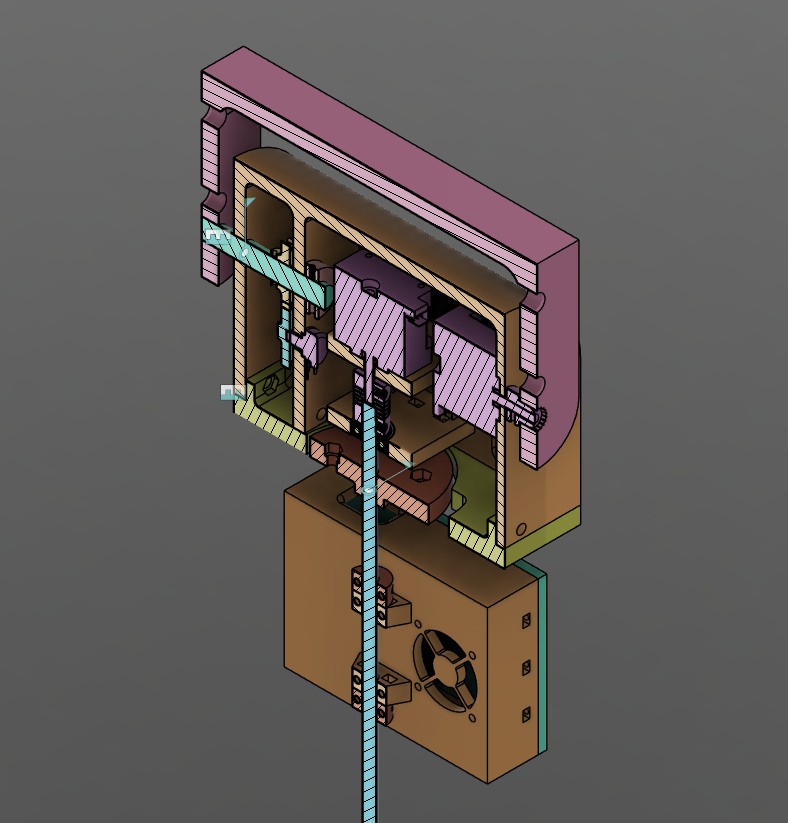
Satellite Tracker View on Github
This custom satellite tracker is designed to automatically track satellites in real-time using Orbitron, stepper motors, and serial communication with a computer. Orbitron provides live satellite position data, which is sent via serial communication to a microcontroller or motor driver. The system processes this data to control stepper motors, which precisely adjust the azimuth and elevation of an antenna or camera to follow the satellite’s movement.
By integrating stepper motors, the tracker ensures accurate positioning without the need for continuous manual adjustments. The system is fully automated and can be configured for different satellites, making it ideal for amateur radio, satellite observation, or educational purposes.
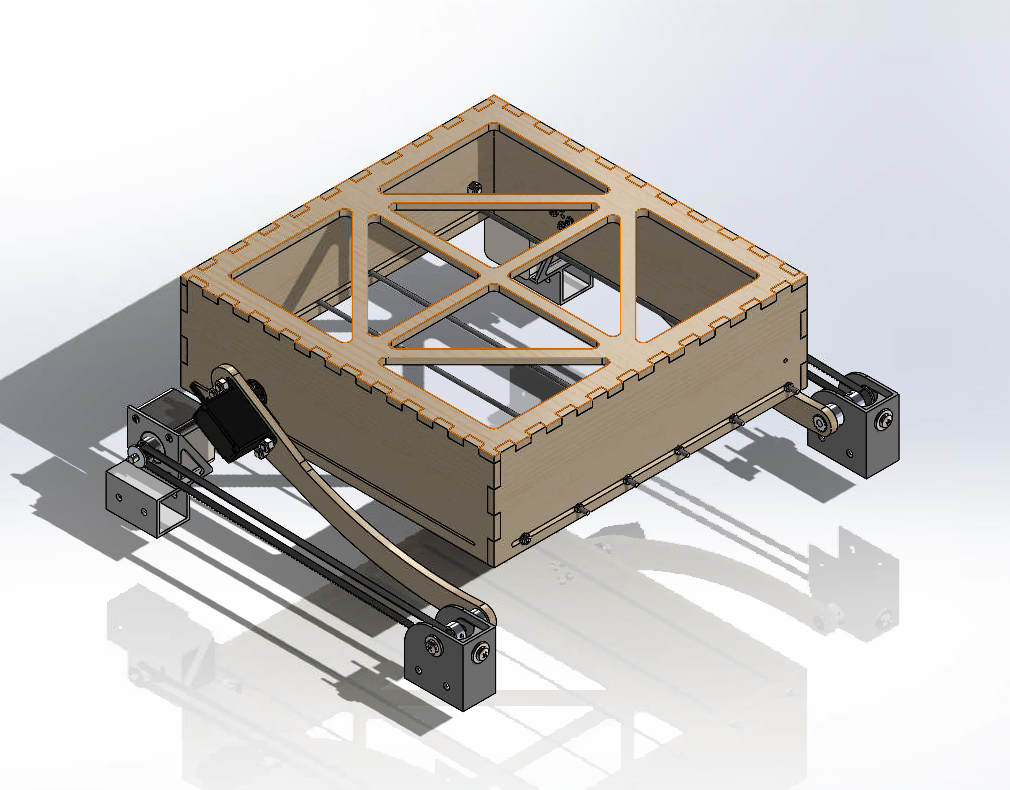
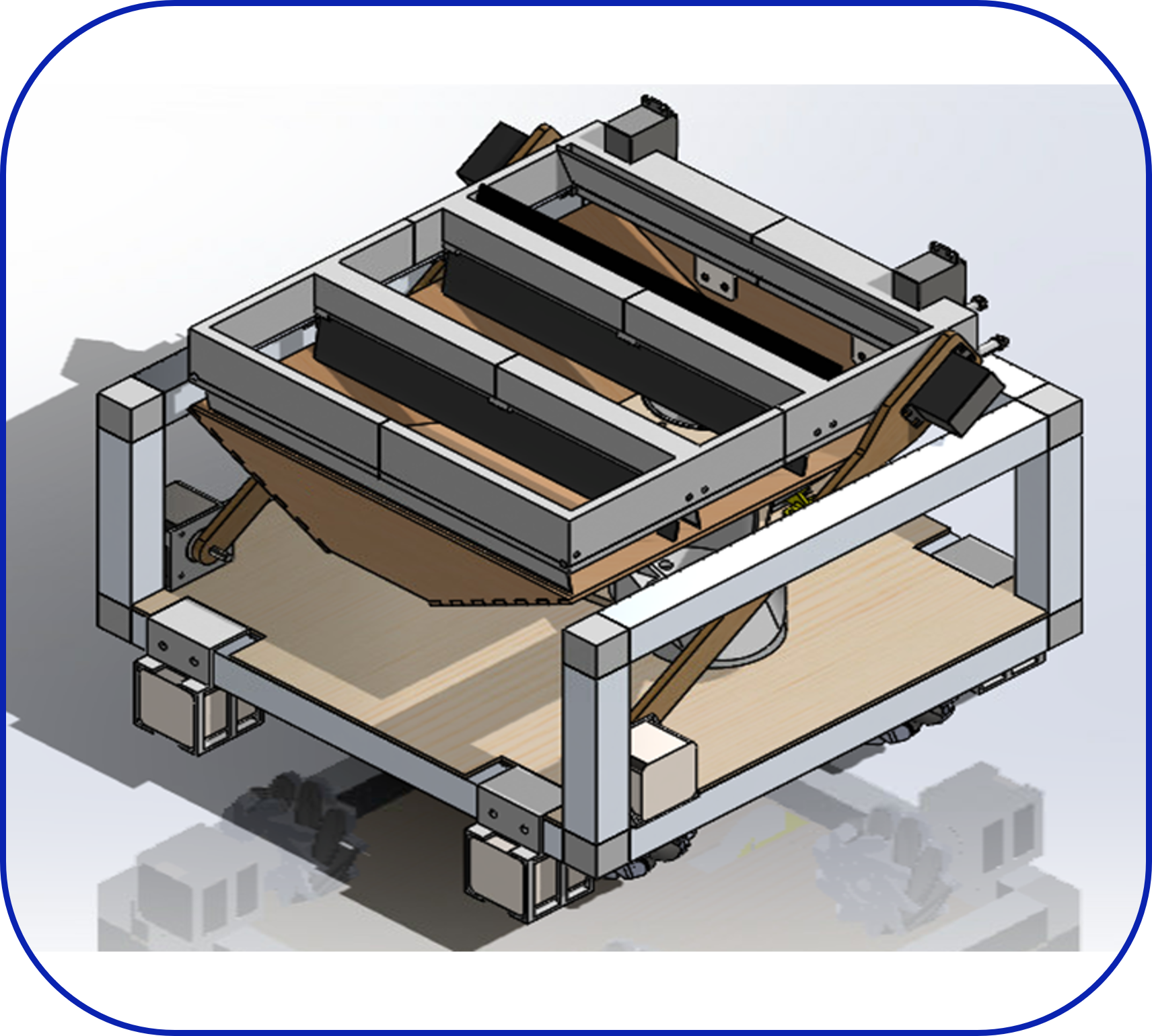
Warman Design Challenge View on Github
The primary task is to create a robotic system that can find and gather meteorites on its own from arbitrary locations, navigate hazardous terrain while keeping the payload under control, and precisely place the meteorites in a storage bunker. The system must meet stringent competition requirements while being small, effective, and able to finish the task in 120 seconds without the need for human assistance.
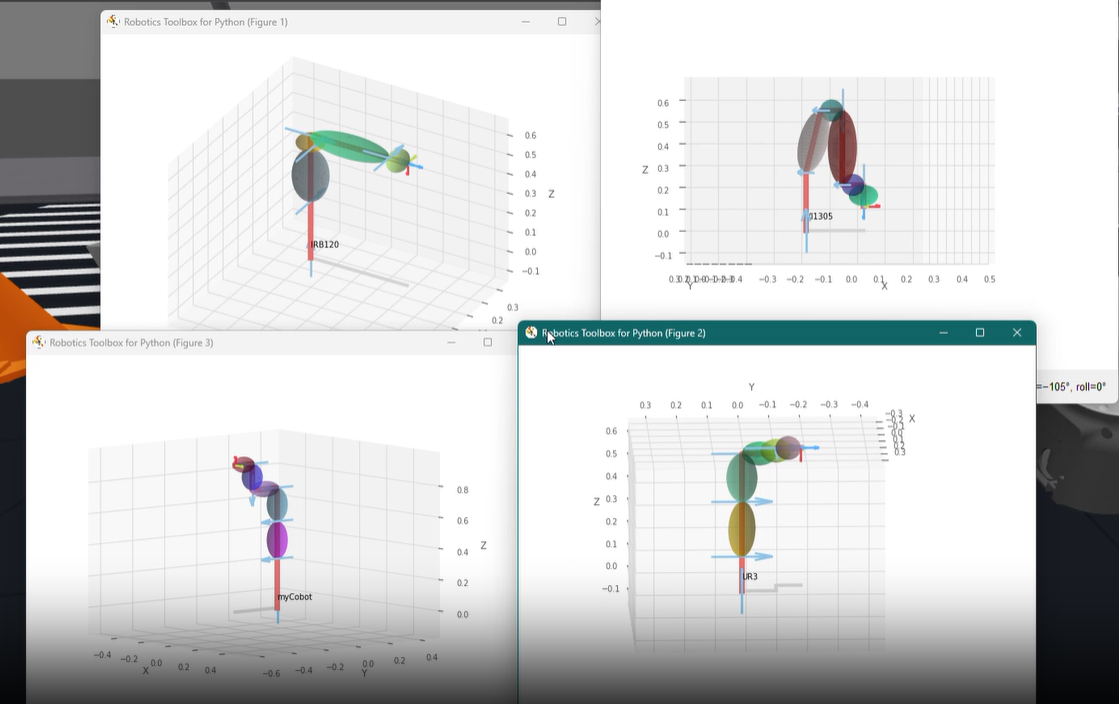
Pick-and-Place DoGoodBot View on Github
This project simulates a collaborative multi-robot pick-and-place system using four robot arms — an ABB IRB120, UR3, myCobot 320, and XI1305 — working together inside a 3D Swift environment to pick up scattered bricks and assemble them into a target structure. Each robot is assigned its own set of bricks and moves using Resolved Motion Rate Control (RMRC), computing joint velocities in real time to reach precise pick and place poses. The system includes a custom ImGui control panel for monitoring and controlling each robot, with a software emergency stop built in. A physical E-STOP button was also wired up using an Arduino, which communicates with the simulation over serial to immediately halt all robot motion if pressed.
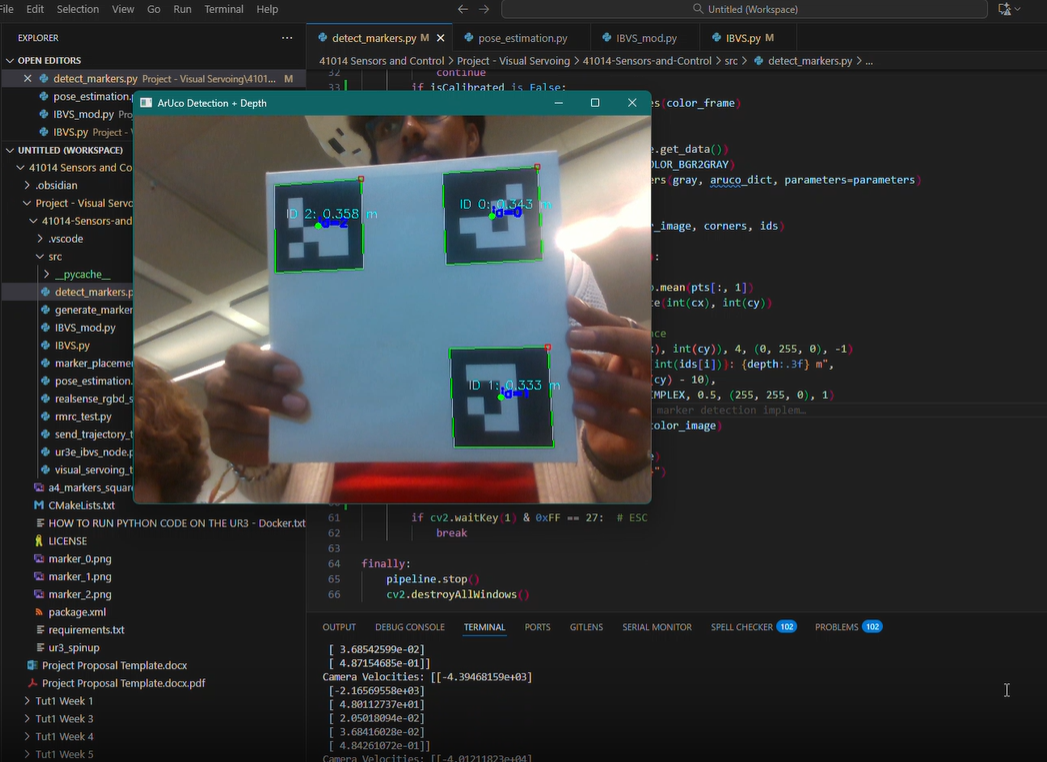
UR3 Visual Servoing View on Github
This project implements an eye-in-hand visual servoing system on a physical UR3 robot arm, where an RGB-D camera is rigidly mounted on the end-effector and moves with the robot. The camera detects an ArUco marker in real time using OpenCV, and the robot continuously adjusts its position based on the image feedback — driving itself until the marker is centred in the frame at the correct distance. The control logic uses the image-based visual servoing (IBVS) method, where the error between the current and desired marker position in the image is used to compute corrective velocity commands. The system runs on ROS Noetic inside Docker and was demonstrated on the physical robot in the UTS robotics lab.